The aim of the project is to lock/unlock the door using a hand gesture.
Problem statement
In public places sanitary conditions are always of concern, particularly of surfaces that are touched by a multitude of persons, such as door handles in rest rooms. Similar issues also arise in medical facilities. Doors that open based on presence are common in environments such as shopping malls; how-ever they are not suited for sensitive areas, such as toilet stalls. Capacitive proximity sensors detect the presence of the human body over a distance and can be unobtrusively applied in order to enable hidden gesture-based interfaces that work without touch.
Material used
Input: Two IR Proximity Sensors Brain: TinkerSpace Brain Board Output: Servo motor Battery: Lithium-ion rechargeable battery
Component description
2 IR PROXIMITY SENSOR
The function of IR Proximity sensor is to detect the person and send the signal to the Brain unit (TinkerSpace board).
SERVO MOTOR
The function of the servo motor is to open and close the door.
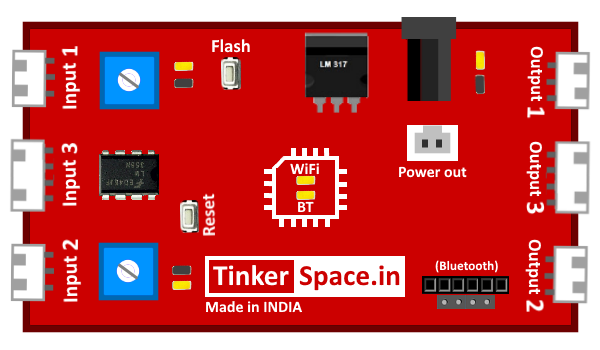
TinkerSpace Brain Board
TinkerSpace board acts as brain of this project, its function is to monitor IR Proximity sensor and control servo motor.
Battery
5V Lithium-Ion battery is used to power-up this project
Working description
Case – 1: When a hand gesture is detected by one IR proximity sensor, the IR proximity sensor 1 (input) turns ON and sends signal 1 to the TinkerSpace brain board (brain). The brain board changes the angle of the servo motor (output) to 90° and the door is locked. Case – 2: When a hand gesture is detected by the other IR proximity sensor, the IR proximity sensor 2 (input) turns ON and sends signal 1 to the TinkerSpace brain board (brain). The brain board changes the angle of the servo motor (output) to 0° and the door is unlocked.
IR proximity sensor 1 ON —> Servo Motor angle 90° IR proximity sensor 2 ON —> Servo Motor angle 0°
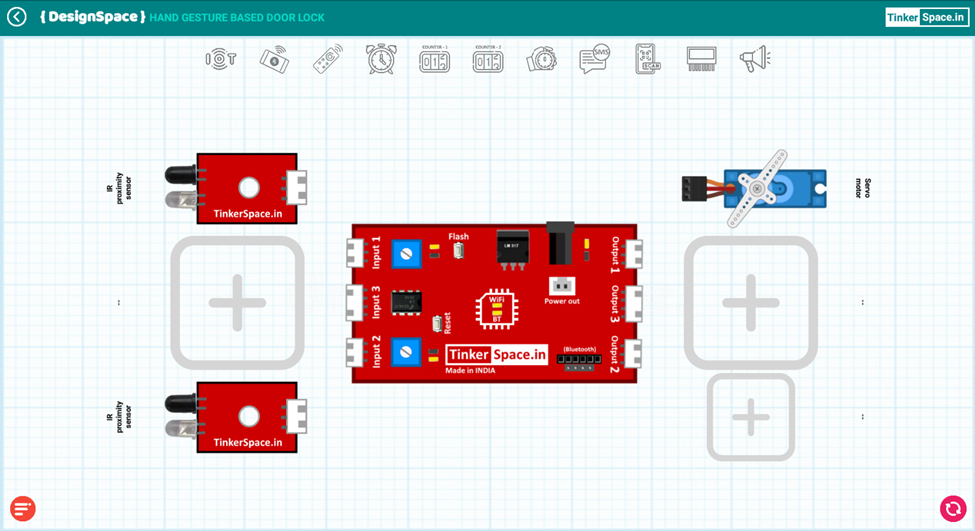
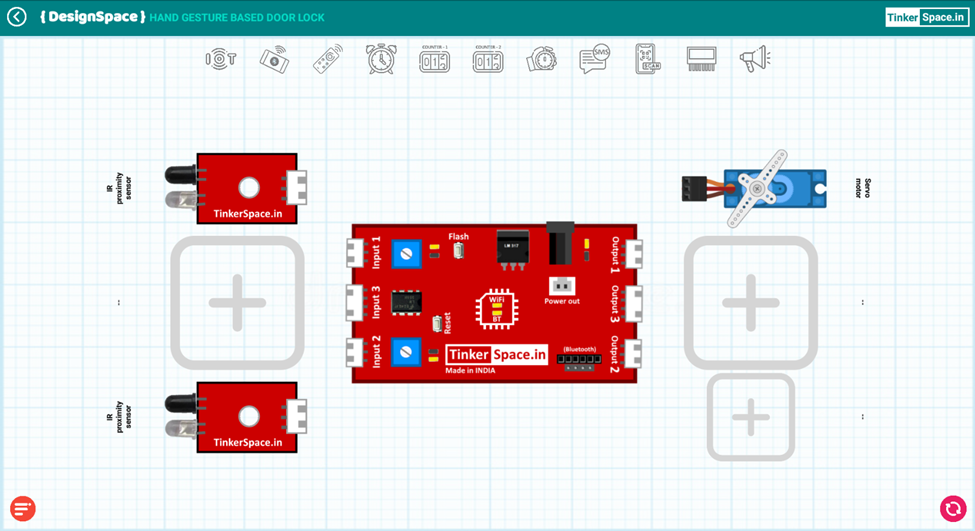
Circuit Design (DesignSpace)
Step 1: Open TCode App -> Create New project -> Open DesignSpace
Step 2: Connect IR Proximity Sensor to INPUT 1 and INPUT 2 of the Brain board.
Step 3: Connect Servo Motor to Output 1 of the Brain Board.