The aim of the project is to build a trolley which follows the object.
Problem statement
The problem statement of “object following trolley” typically involves creating a system or device where an object, such as a robot or autonomous vehicle, follows a trolley or cart autonomously. This system can be useful in various industrial, logistic, or transportation scenarios. The problem statement may include aspects like designing sensors and control algorithms to enable the object to track and follow the trolley’s movement accurately while maintaining a safe distance and avoiding obstacles.
Material used
Input: 2 IR Proximity Sensors Brain: TinkerSpace Brain Board Output: Motor Driver Battery: Lithium-ion rechargeable battery
Component description
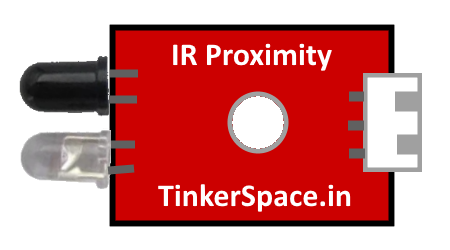
IR PROXIMITY SENSOR
The function of IR Sensors is to detect the line and send the signal to the Brain unit (TinkerSpace board).
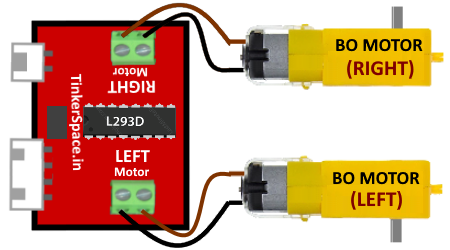
MOTOR DRIVER
The function of the motor driver is to move along with object.
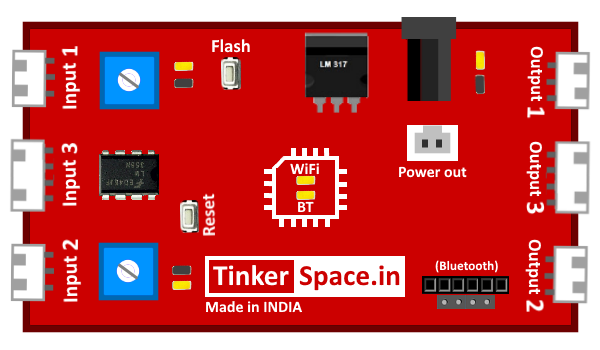
TinkerSpace Brain Board
TinkerSpace board acts as brain of this project, its function is to monitor IR Proximity Sensors and control the Motor driver.
Battery
5V Lithium-Ion battery is used to power-up this project
Working description
Left sensor Right sensor Robot action 1 (Object) 1 (Object) Forward 0 (No Object) 1 (Object) Left 1 (Object) 0(No Object) Right 0 (No Object) 0 (No Object) Stop
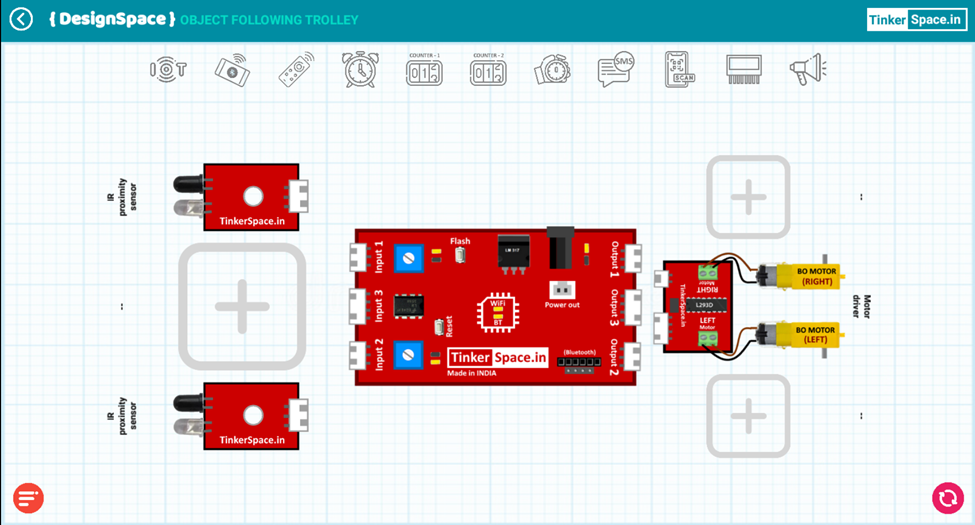
Circuit Design (DesignSpace)
Step 1: Open TCode App -> Create New project -> Open DesignSpace
Step 2: Connect IR Proximity to INPUT 1 and INPUT 2 of the Brain board.
Step 3: Connect the Motor driver to the Output 3 of the Brain Board.