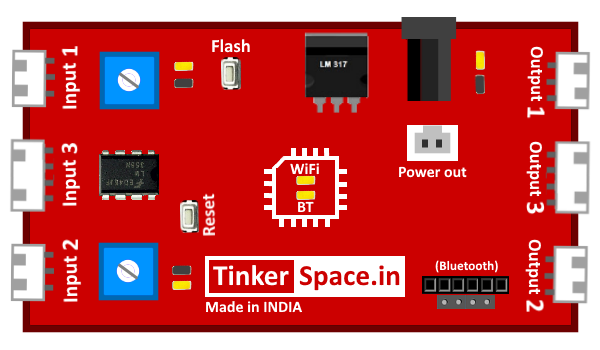
Gesture-Controlled Robot Arm By TinkerDecember 27, 2023March 31, 2024Electronics + Mechanical, Sensor, T-Code, Uncategorised Aim The aim of this project is to Build a robot arm controlled by a proximity sensor, allowing users to guide the arm’s movements through hand gestures. Problem statement Material used Input: 2 Light Sensor Brain: TinkerSpace Brain Board Output: 2 Servo MotorBattery: 5V Lithium-ion rechargeable battery Component description 2 Light sensor The function of light sensor is to detect the light and send the signal to the Brain unit (TinkerSpace board). Servo Motor Servo motors are used to control the robotic arm TinkerSpace Brain Board TinkerSpace board acts as brain of this project, its function is to monitor Light Sensors and control LED LAMP, Servo Motor. Battery 5V Lithium-Ion battery is used to power-up this project Working description Case – 1:Case – 2: Circuit Design (DesignSpace) Step 1: Connect 2 LIGHT SENOSOR to input 1 and input 2Step 2: Connect 2 Servo Motors to output 1 and output 2Step 3: Connect supply and test project.