The aim of the project is to build a robot which avoids accidents by not hitting objects.
Problem statement
Road accidents are unfortunately a common occurrence in day-to-day life, and they can happen at any time and in any place. Designing a vehicle that can detect potential collisions with other objects or vehicles on the road can prevent them. An accident avoiding car senses its surroundings, including other vehicles, pedestrians, and obstacles, and make decisions based on that information to avoid accidents.The primary goal of an accident-avoiding car is to reduce the number of accidents on the road and improve overall safety for drivers, passengers, and pedestrians.
Material used
Input: 2 IR Proximity Sensors Brain: TinkerSpace Brain Board Output: Motor Driver Battery: Lithium-ion rechargeable battery
Component description
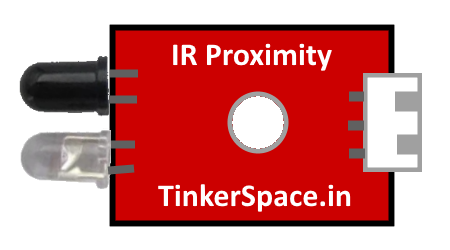
2 IR PROXIMITY SENSOR
The function of IR Proximity Sensors is to detect the obstacles and send the signal to the Brain unit (TinkerSpace board).
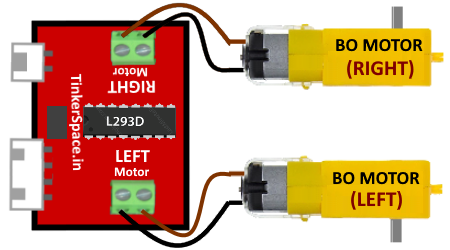
MOTOR DRIVER
The function of the motor driver is to avoid the obstacles and prevent collision.
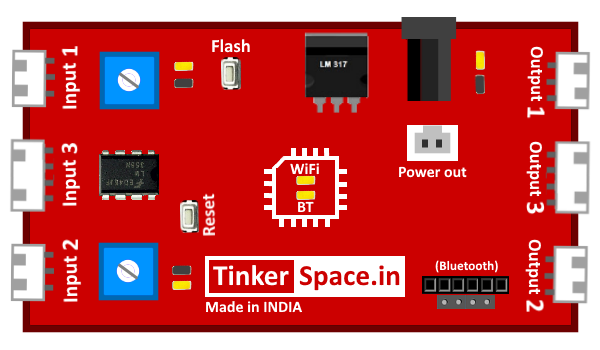
TinkerSpace Brain Board
TinkerSpace board acts as brain of this project, its function is to monitor IR Proximity Sensors and control the Motor driver.
Battery
5V Lithium-Ion battery is used to power-up this project
Working description
Left sensor Right sensor Robot action
1 (Object) 1 (Object) Stop
0 (No object) 1 (Object) Left
1 (Object) 0 (No object) Right
0 (No object) 0 (No object) Forward
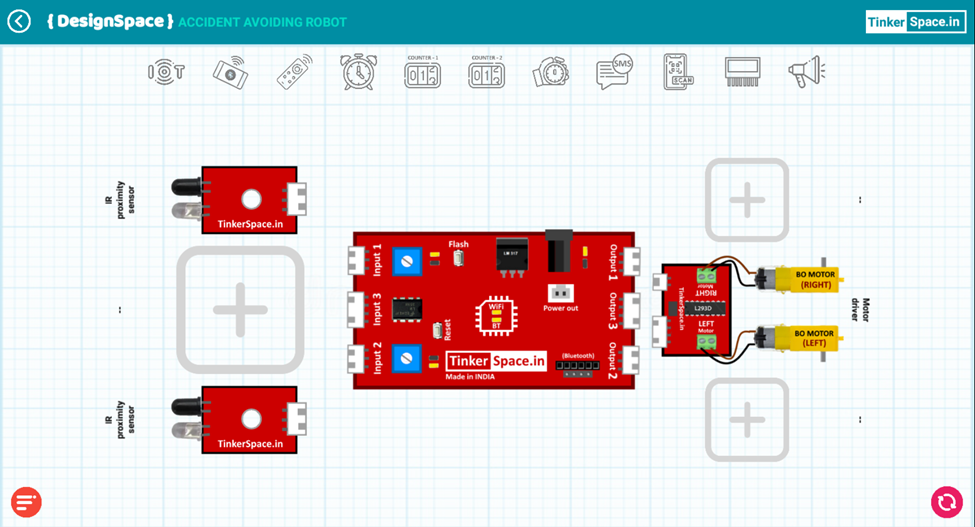
Circuit Design (DesignSpace) PENDING
Step 1: Open TCode App -> Create New project -> Open DesignSpace
Step 2: Connect IR Proximity Sensors to INPUT 1 and INPUT 2 of the Brain board.
Step 3: Connect the Motor driver to the Output 3 of the Brain Board.