The aim of the project is to build a robot which serves food.
Problem statement
We all love to eat our favourite food. Now imagine a robot serving food for us. Interesting? We have developed many robots for various purposes, so why not food serving? This can be implemented during functions which requires a good amount of manpower. The robot moves in a line to each and every guest and serves the food that they like.
Material used
Input: 2 IR Proximity Sensors Brain: TinkerSpace Brain Board Output: Motor Driver Battery: Lithium-ion rechargeable battery
Component description
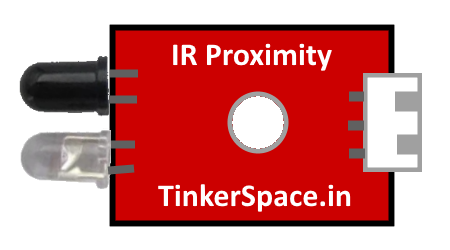
IR PROXIMITY SENSOR
The function of IR proximity sensor is to detect the line and send the signal to the Brain unit (TinkerSpace board).
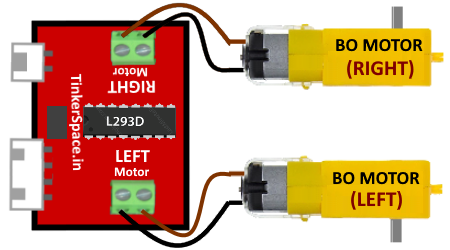
MOTOR DRIVER
The function of the motor driver is to move the robot.
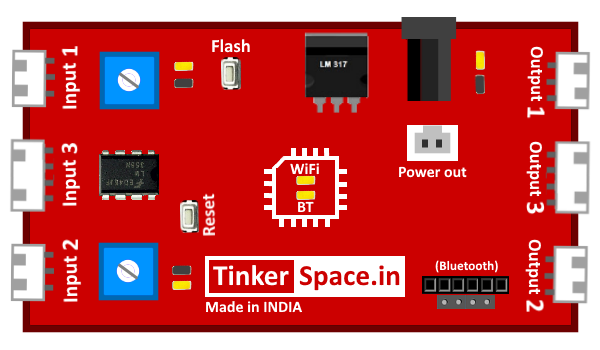
TinkerSpace Brain Board
TinkerSpace board acts as brain of this project, its function is to monitor IR Proximity Sensors and control the Motor driver.
Battery
5V Lithium-Ion battery is used to power-up this project
Working description
Left sensor Right sensor Robot action 1 (No line) 1 (No line) Forward 0 (Line) 1 (No line) Left 1 (No line) 0 (Line) Right 0 (Line) 0 (Line) Stop
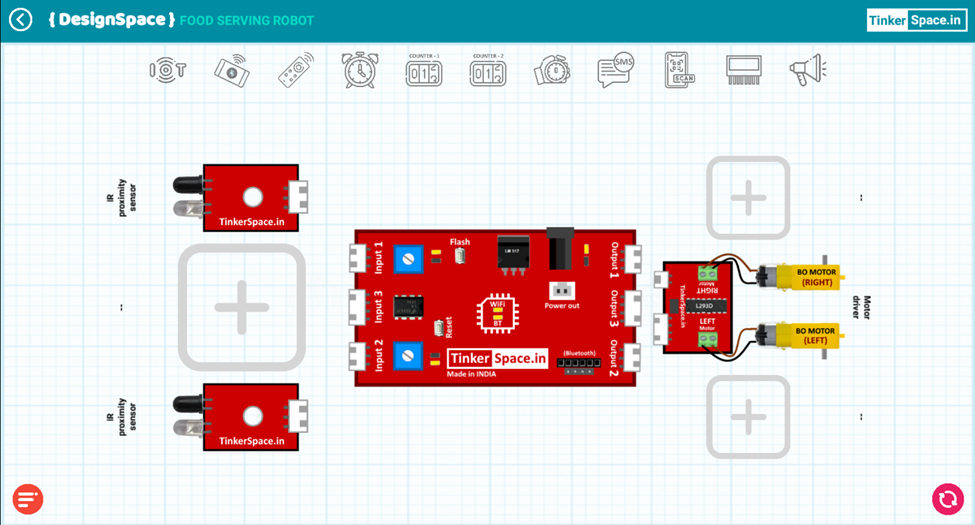
Circuit Design (DesignSpace)
Step 1: Open TCode App -> Create New project -> Open DesignSpace
Step 2: Connect 2 IR Proximity to INPUT 1 and INPUT 2 of the Brain board.
Step 3: Connect the Motor driver to the Output 3 of the Brain Board.