The aim of the project is to build a robot that is controlled by the voice directions.
Problem statement
The problem statement of a voice-controlled robot typically revolves around designing and implementing a robot that can be controlled using voice commands. This involves developing hardware and software systems that enable the robot to understand and respond to spoken instructions, navigate its environment, and perform specific tasks or actions based on the received voice commands. Some specific aspects of the problem statement may include:
Speech Recognition: Developing or integrating a speech recognition system to accurately convert spoken words or phrases into machine-readable commands.
Natural Language Processing: Implementing natural language processing techniques to interpret and understand the context of voice commands, allowing for more sophisticated interactions.
Hardware Integration: Designing or adapting the robot’s hardware components (motors, sensors, actuators) to respond to voice-controlled instructions effectively.
Navigation and Movement: Creating algorithms for the robot to navigate and move based on voice commands, which may include tasks like moving to specific locations or avoiding obstacles.
Task Execution: Defining the tasks or actions the robot should perform in response to voice commands, such as fetching objects, providing information, or performing specific operations.
Robustness: Ensuring the system works reliably in various environments and under different noise conditions.
User Interface: Developing a user-friendly interface for users to interact with the robot through voice commands.
The goal is to create a voice-controlled robot that can understand and act upon spoken instructions accurately, making it a versatile and user-friendly tool for various applications, including home automation, healthcare, and industrial tasks.
Material used
Input: Bluetooth Brain: TinkerSpace Brain Board Output: Motor Driver Battery: Lithium-ion rechargeable battery
Component description
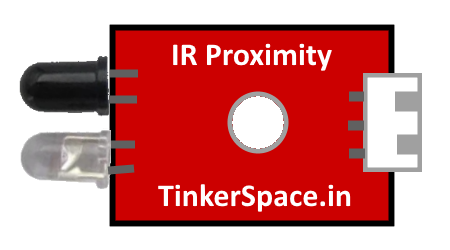
IR PROXIMITY SENSOR
The function of IR Sensors is to detect the voice and send the signal to the Brain unit (TinkerSpace board).
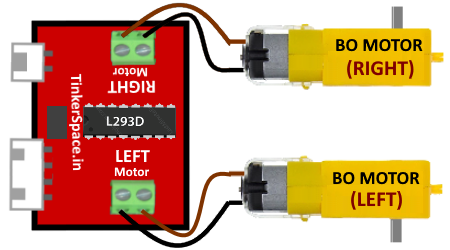
MOTOR DRIVER
The function of the motor driver is to move to the directions.
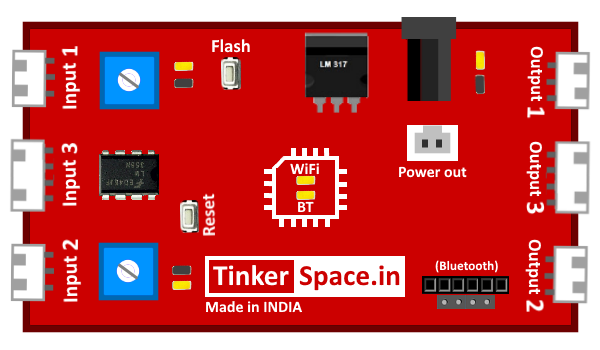
TinkerSpace Brain Board
TinkerSpace board acts as brain of this project, its function is to monitor IR Proximity Sensors and control the Motor driver.
Battery
5V Lithium-Ion battery is used to power-up this project
Working description
Voice Direction Robot action “MOVE FORWARD” Forward “TURN RIGHT” Right “TURN LEFT” Left “STOP” Stop
Circuit Design (DesignSpace)
Step 1: Open TCode App -> Create New project -> Open DesignSpace
Step 2: Connect the Bluetooth module to the Bluetooth Connector of the Brain board.
Step 3: Connect the Motor driver to the Output 3 of the Brain Board.