The aim of the project is to Machine to sort dry and Wet waste
Problem statement
The system should incorporate sensors, machine learning algorithms, or computer vision to identify and sort materials such as plastic, paper, glass, and metal efficiently. Address challenges like real-time processing, adaptability to varying waste compositions, and user-friendly interfaces for maintenance and operation. Create a waste sorting machine that contributes to improved recycling practices, reduces environmental impact, and is suitable for integration into waste management facilities or public spaces.
Material used
Input: IR Proximity Sensor and Moisture Sensor Brain:TinkerSpace Brain Board
Output:Servo Motor
Battery: 5V Lithium-ion rechargeable battery
Component description
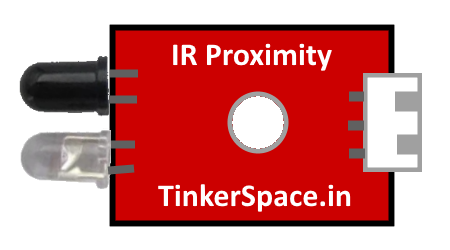
IR Proximity Sensor
The function of the IR Proximity Sensor is to detect the Waste Disposal
Moisture Sensor
The function of the Moisture Sensor is to detect the wet waste
Servo Motor
Servo motor is used to segregate the dry and wet waste.
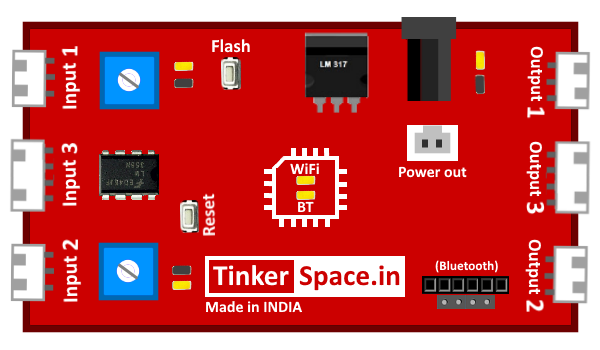
TinkerSpace Brain Board
TinkerSpace board acts as brain of this project, its function is to monitor IR Proximity Sensor,Moisture Sensor and control the servo motor
Battery
5V Lithium-Ion battery is used to power-up this project
Working description
Case 1: When the waste is detected, IR Proximity sensor turns ON and sends the signal to brain board.
Case 2: When the moisture is detected, Moisture sensor turns ON and sends the signal to brain board. The brain board oscilates the servo motor to 135Degree.
Case 3: When no moisture is detected, Moisture sensor turns OFF and sends the signal to brain board. The brain board oscilates the servo motor to 45Degree.
Case 4: When no waste is detected, IR Proximity sensor turns OFF and sends the signal to brain board. The brain board oscilates the servo motor to 90Degree.
Circuit Design (DesignSpace)
Step 1: Connect IR Proximity Sensor to input1 and Moisture Sensor to input 2